Форма входа |
|---|
Категории раздела | |||||||
|---|---|---|---|---|---|---|---|
|
Поиск |
|---|
Архив записей |
|---|
Статистика |
|---|
Онлайн всего: 2 Гостей: 2 Пользователей: 0 |
Сайт
Блог
Главная » 2013 Июнь 17 » Л18 Постановка задачи параметрической идентификации. Понятие об адаптивной и неадаптивной идентификации22:10 Л18 Постановка задачи параметрической идентификации. Понятие об адаптивной и неадаптивной идентификации |
Введем обозначения: Y – вектор переменных выхода; U – вектор управляющих воздействий; X – вектор переменных входа (часть наблюдений, касающихся переменных входа, контролируемые возмущения d1 по схеме Рея); A – вектор параметров модели; Тогда под параметрической идентификацией понимаем процесс переопределения параметров A в режиме нормальной эксплуатации объекта, при этом структура математической модели известна и выглядит следующим образом St: Y=F (X, U, A). Неадаптивная параметрическая
идентификация
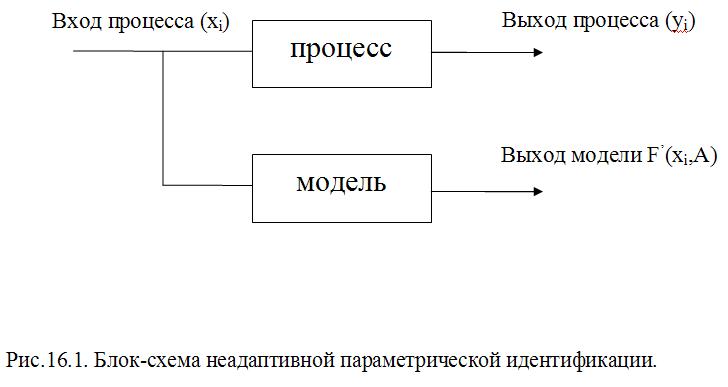
В задаче параметрической идентификации (рис. 16.1) присутствуют два типа данных: 1. Априорные данные (в виде структуры мат.модели): St: Y=F (X, U, A) Y=F | (X, A) |u-фиксированное В задаче идентификации, т.к. вход U-вызывающая сила, они не характеризуют механизм (динамику) модели, поэтому U=const 2. Апостериорные данные (наблюдения): I=<Xi, Yi>, i=1..N – число наблюдений, I – информация о наблюдаемых входах и выходах по N наблюдениям. Тогда задача параметрической идентификации выглядит следующим образом: A=Y (St, I), где Y – алгоритм идентификации. Т.о. необходимо отыскать такой алгоритм определения вектора A, чтобы была минимальна ошибка выходов процесса и модели при реакции на одинаковый вход. Следовательно, эта задача находится в классе минимизационных задач, в которых отыскивается минимум погрешности моделирования по некоторому выбранному заранее критерию качества. Неадаптивная идентификация в режиме off-line позволяет получить оптимальные оценки параметров A сразу, используя всю информацию I по N наблюдениям за достаточный отрезок времени. Такой подход возможен при использовании детерминированных динамических моделей. Адаптивная параметрическая идентификация 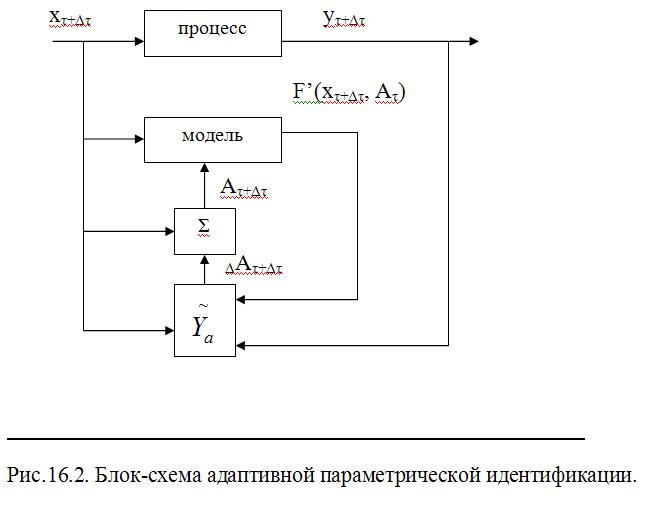
Адаптивная идентификация проводится непрерывно, в режиме on-line. Она представляет собой процесс построения модели объекта в виде аналитической зависимости на основании сведений о значении искомой функции и ее аргументов. В качестве функции может выступать любой искомый обобщенный показатель, а в качестве аргументов - величины координат в пространстве состояний, параметры и показатели. Предполагается, что значения функции определяются значениями ее аргументов. Параметры зависимости функции от своих аргументов находятся автоматически по известным алгоритмам (рис.16.2). Никаких предварительных соображений о структуре зависимости функции от ее аргументов и параметров запаздывания не требуется. On-line: вектор Aτ= (α1τ, …, αmτ )T – параметры модели, определенные на предыдущем шаге по времени τ. На следующем шаге получим I Δτ=< xτ+Δτ, yτ+Δτ> - наблюдения за входом и выходом процесса на текущем шаге по времени τ+Δτ, тогда располагая данными о параметрах Aτ и I Δτ с помощью адаптивного алгоритма Ya надо перейти к улучшенным оценкам вектора A на текущем шаге по времени: (Aτ , I Δτ) –> Aτ+Δτ, тогда сформулируем задачу адаптивной параметрической идентификации.
Т.о. адаптивная идентификация в непрерывном режиме постоянно корректирует параметры А в целях обеспечения адекватности модели в пределах заданной точности. Алгоритм Ya строится как рекуррентная (непрерывная) процедура, позволяющая более рационально обеспечивать сходимость алгоритма. Понятно, что адаптивная идентификация необходима при использовании упрощенных (формальных) недетерминированных моделей, у которых природа погрешностей содержится в структуре моделей. В большинстве случаев статических моделей. Понятие о типовой идентификации. В классической ТАУ рассматриваются объекты управления как объекты с сосредоточенными параметрами, последние описываются математически через аппарат передаточных функций. В ТАУ различные элементы систем выделены в класс типовых динамических звеньев. Тогда становится возможным структурный синтез передаточных функций более сложных объектов. Для этого осуществляют выбор комбинаций динамических звеньев на основе анализа формы входных и выходных сигналов. Сущность метода типовой идентификации заключается в том, что на базе накопленного опыта и теоретических исследований в области автоматики по наиболее часто встречающимся характеристикам входных и выходных сигналов выбирается сконструированный заранее оператор (передаточная функция Wобъекта(p)), близкий к истинному значению неизвестного оператора объекта. Т.о., в типовой идентификации проблема удержания модели в состоянии адекватности нелинейному объекту решается с помощью адаптивных алгоритмов параметрической идентификации. |
|
|

| Всего комментариев: 0 | |