Форма входа |
|---|
Категории раздела | |||||||
|---|---|---|---|---|---|---|---|
|
Поиск |
|---|
Архив записей |
|---|
Статистика |
|---|
Онлайн всего: 1 Гостей: 1 Пользователей: 0 |
Сайт
Блог
Главная » 2013 Июнь 17 » Л20 Системы диагностики.22:18 Л20 Системы диагностики. | |
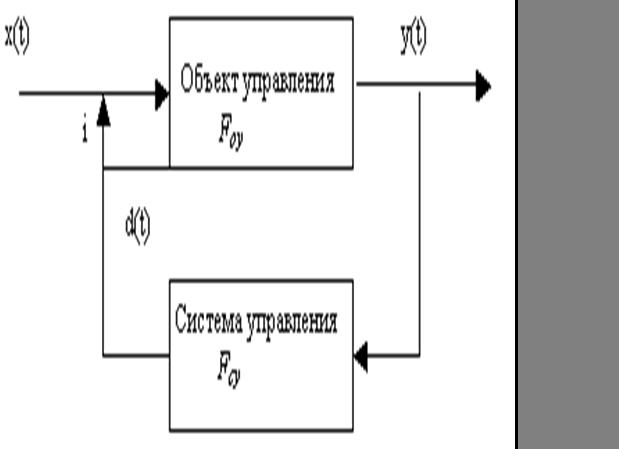
18.1.Определение систем диагностики. Классификация систем диагностики. Их место среди информационных систем и технологий. Системы диагностики (СД), которые относятся к классу измерительных систем (ИС), предназначены для контроля, диагностирования, сертификации, идентификации, распознавания и мониторинга состояния наблюдаемых объектов. Мир объектов диагностирования (объектов второй природы) весьма широк и включает в себя объекты, буквально, от предметов бытовой техники до аэрокосмических аппаратов. Мир объектов первой природы, в последнее время, тоже стал предметной областью информационного мониторинга их состояния. Сюда относят сейсмомониторинг, гидромониторинг, метеомониторинг, мониторинг объектов живой природы, включая мониторинг состояния здоровья человека. В последнее десятилетие, осуществляя классификацию систем диагностики оборудования сложных технических объектов, выделяют следующие системы: ■ информационно-диагностические сети и системы; ■ автономные диагностические приборы и системы; ■ виртуальные диагностические приборы. Для выполнения процедур диагностирования, сертификации, распознавания и мониторинга состояния объектов наблюдения применяются информационные технологии, которые относятся к одному из классов информационных технологий, а именно, к информационным технологиям технической диагностики и мониторинга (TDM-технологии). TDM-технологии, по определению, строятся на основе статических моделей системы и динамических или имитационных моделей процессов развития, движения, деградации и гибели. Другими словами, для диагностирования требуются диагностические статические модели, а для мониторинга -имитационные модели движения (тренда) состояния объекта наблюдения. 18.2. Отличительные особенности моделирования TDM-систем от систем автоматического управления (САУ). Главной отличительной особенностью моделирования TDM-систем от САУ является то, что системы САУ, какими бы законами управления они не были бы наделены (программное управление, управление по возмущениям или управление с обратными связями) требуют разработки математической модели в виде единого уравнения, куда входят передаточные функции как объекта управления, так и собственно системы управления (рис.18.1).
Рис.18.1. Структура САУ. На концептуальном уровне моделирования это утверждение выглядит так:
y(t)±d(t) = (Foy,Fcy)x(t), (18.1) где y(t), d(t), x(t) - выходные и входные сигналы, Foy, Fсy - передаточные функции объекта и системы управления соответственно. Для TDM-систем, которые при любой технологии всегда являются разомкнутыми, объект наблюдения и система контроля (диагностики, идентификации, диагностики и мониторинга) всегда требуют построения собственных моделей. При этом модели должны разрабатываться как статическими, так и динамическими или имитационными.
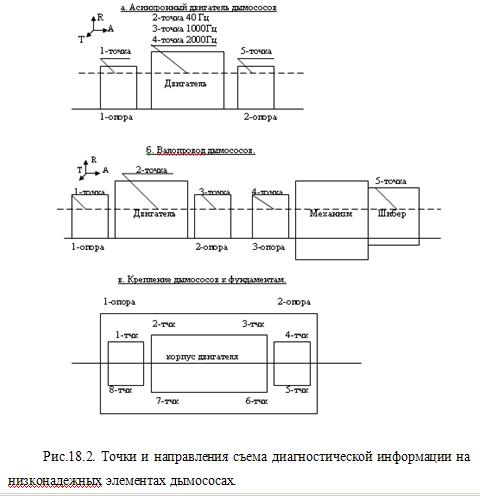
18.3. Статическая модель объекта наблюдения. Рассмотрим крупное электрооборудование котельного цеха крупной городской ТЭЦ. В его число, как правило, включают дымососы, дутьевые вентиляторы и дымососы рециркуляции газов. На рис.18.2. приведены, выбранные нами для контроля, элементы конструкции, точки съёма (1,2,...) и направления съёма (А,R,Т) вибрационных параметров дымососа. На корпусе асинхронного двигателя находятся три точки замера информации. Вызвано это тем, что приходится снимать информацию в различных диапазонах частот. Так для определения частоты скольжения необходим диапазон от 0,2 Гц до 40 Гц, для контроля общего состояния электромагнитной системы двигателя необходим диапазон от 5 Гц до 1000 Гц, а для контроля вентиляторов двигателя - диапазон от 10 Гц до 2000 Гц.
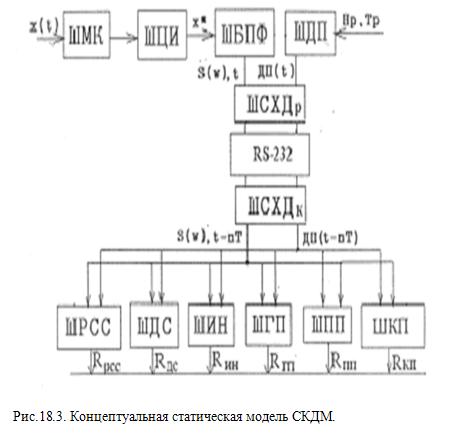
С учетом выбранных для контроля конструктивных элементов, точек и направлений замеров вибрации, а также технологических (Нр) и температурных (Тр) параметров, концептуальная статистическая модель технического состояния асинхронного двигателя дымососа запишется так: К5тТз(Д) = {Нр + Тр + (5АRТ)д] (18.2) Концептуальные статистические модели состояния дутьевого вентилятора и дымососа рециркуляции газов будут аналогичны модели дымососа. Их отличие заключается только в числе точек съёма информации. 18.4. Статическая модель системы контроля, диагностики и мониторинга технического состояния двигателя дымососа. Рассмотрим концептуальную статическую модель системы контроля, диагностики и мониторинга (СКДМ) технического состояния асинхронных агрегатов, построенную с помощью теории шкал. После определения (выбора) структуры функций СКДМ и, заменив их шкалами, (рис. 18.3.) получим:
На рис. 18.3. отображены: ШМК - шкала метрологического кодирования; ШЦИ - шкала цифровых измерений; ШБПФ - шкала быстрых преобразований Фурье; ШДП - шкала дополнительных параметров; ШСХДр - шкала сбора и хранения данных прибора и ШСХДк - шкала сбора и хранения данных компьютера, соединяемые через RS-232; ШРСС - шкала расчетов скорости скольжения ротора; ШДС - шкала диагностирования состояний; ШИН - шкала идентификации неисправностей; ШГП - шкала генезиса параметров; ШПП - шкала прогнозирования параметров; ШКП - шкала корреляции параметров; х(t) - входной сигнал вибрации в точке съема информации. Кроме того, Нр, Тр - дополнительные технологические и температурные параметры соответственно; S(w), ДП(t) - выходные параметры коллектора/сборщика и одновременно входные параметры технологического компьютера. Выходными параметрами шкал, реализованных на технологическом компьютере, являются: Rрсc - результат расчета скорости скольжения ротора; Rдс - результат диагностики состояния объекта; Rин - результат идентификации неисправностей; R.гп - результат генезиса параметров; Rпп - результат прогноза параметров; Rкп - результат корреляции параметров. Следовательно, концептуальная дескриптивная статическая модель СКДМ является структурой ее функциональных модулей, представленных структурой шкал. В дескриптивном виде концептуальная статическая модель СКДМ может быть представлена следующим выражением: Кsm(СКДМ) = {ШМК, ШЦИ, ШБПФ, ШДП, ШСХДр, ШСХДк, ШРСС, ШДС, ШИН, ШГП, ШПП, ШКП} | |
|
|
| Всего комментариев: 0 | |