Форма входа |
|---|
Категории раздела | |||||||
|---|---|---|---|---|---|---|---|
|
Поиск |
|---|
Архив записей |
|---|
Статистика |
|---|
Онлайн всего: 1 Гостей: 1 Пользователей: 0 |
Сайт
Блог
Главная » 2013 Июнь 17 » Л6 1.Уровни АСУ ТП. Классификация математических моделей по сложности.17:38 Л6 1.Уровни АСУ ТП. Классификация математических моделей по сложности. |
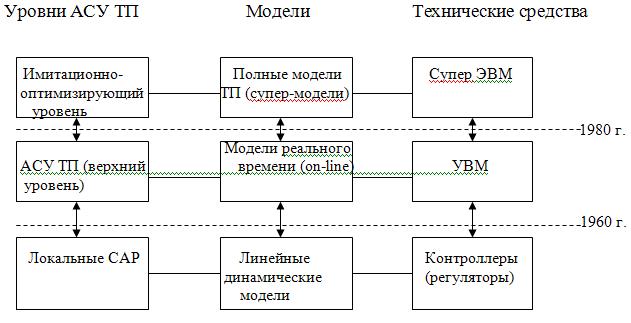
В последнее время возможности ЭВМ существенно расширились. Это позволяет ставить задачи развития имитационно-оптимизирующего уровня управления, в результате чего и формируется структура, так называемых, (по предложению В.Г, Лисиенко) трехуровневых систем управления технологическими процессами ТАСУ ТП. Основные принципы построения трехуровневых АСУ ТП (ТАСУ ТП) основаны, с одной стороны, на тенденции развития интеллектуального уровня современных АСУ ТП, а с другой – на все расширяющихся возможностях управляющей и вычислительной техники. В самой иерархии построения ТАСУ ТП сохраняется исторически прослеживаемая последовательность перехода от простого к сложному – от обычных следящих локальных САР к современным интеллектуальным САУ.
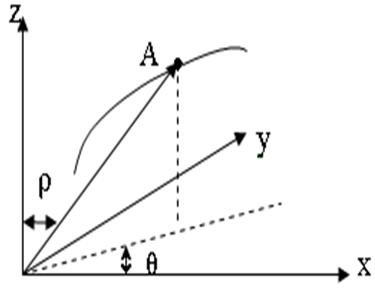
Рис.6.1 Иерархическая структура построения трехуровневых ТАСУ ТП в соотношении со структурой моделей и техническими средствами управления. На базовом уровне ТАСУ ТП находятся локальные САР (см. рис.6.1), обеспечивающие стабилизацию важнейших параметров технологических процессов во всех технологических зонах объектов. На этом уровне могут реализовываться разнообразные виды локальных САР: следящие, по отклонению, с компенсацией по возмущению (инвариантные), связанные, с коррекцией, комплексные, многомерные и т.д. Второй уровень управления является важнейшим показателем перехода от локальных САР к АСУ ТП – он характеризуется наличием элементов, позволяющих в режиме реального времени выполнять основные «автоматные» функции АСУ ТП: оценивание, идентификацию и оптимизацию режимов технологических процессов, т.е. осуществлять тактическое управление процессом. Наконец, в третьем имитационно-оптимизирующем контуре реализуются функции базовой (стратегической) поддержки АСУ ТП. В этом контуре уже на стадии проектирования АСУ ТП проводятся предпроектные исследования системы (в режиме стратегического управления): отрабатываются модели реального времени для второго уровня ТАСУ ТП в виде оптимальных траекторий, рассчитываются размеры резервных (буферных) зон для учета динамики при переменном темпе, определяются места установки датчиков и вносятся при необходимости корректировки в их показания, разрабатываются системы диагностики и экспертные системы. В процессе эксплуатации (в режиме тактического управления) имитационно-оптимизирующий контур используется для текущей идентификации параметров модели реального времени и экспертных систем, для уточнения оптимальных траекторий и динамики управления. 2. Понятие об объектах с сосредоточенными и распределенными параметрами. Объекты с сосредоточенными параметрами – это объекты, у которых параметры состояния зависят от входных величин и времени и не зависят от внутренних координат объекта и системы. Математически объект с сосредоточенными параметрами может быть представлен как Y = f (X,t). Пример. Летательный аппарат (точка А) и траектория его полета.
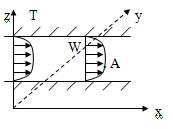
ρ – орбитальный угол (угол места); θ – азимутальный угол; Объект как бы стягивается в точку, а координаты x,y,z – это лишь внешние координаты для данного объекта, и его уравнение имеет вид: Y = f (X,t). Объекты с распределенными параметрами – объекты, у которых вектор выходных величин зависит от вектора входных величин, времени и внутренних координат данного объекта или системы. Уравнение таких объектов может быть записано в виде: Y = f (X,t,xвнутр, yвнутр, zвнутр.) Пример. Движение среды в канале.
Здесь используются 3-х мерные модели: Т = Ψ (xвнутр, yвнутр, zвнутр). Оцениваются поля скоростей, температур, давлений и т.д. W = f (xвнутр, yвнутр, zвнутр) При этом возникают понятия: интегральная и локальная характеристики, минимальная и максимальная характеристики, средняя величина, поля величин и т.д. |
|
|
| Всего комментариев: 0 | |